class: center, middle, inverse, title-slide .title[ # Computational Statistics ] .subtitle[ ## Lecture 2 ] .author[ ### Yixuan Qiu ] .date[ ### 2023-09-13 ] --- class: inverse, center, middle # Numerical Linear Algebra --- # Important Problems - Linear systems - Eigenvalues - Sparse matrices --- # Today's Topics - Preliminaries - Triangular and tridiagonal systems - LU decomposition - Cholesky decomposition --- class: inverse, center, middle # Preliminaries --- class: center, middle # Useful Formulas --- # Trace - `\(\mathrm{tr}(AB)=\mathrm{tr}(BA)\)` - `\(\mathrm{tr}(ABC)=\mathrm{tr}(BCA)=\mathrm{tr}(CAB)\)` - `\(\require{color}\color{red} \mathrm{tr}(ABC)\neq\mathrm{tr}(ACB)\)` - `\(\mathrm{tr}(A'B)=\mathbf{vec}(A)'\mathbf{vec}(B)=\mathbf{vec}(B)'\mathbf{vec}(A)\)` --- # Determinant - `\(\det(AB)=\det(A)\det(B)\)` - `\(\det(A^{-1})=[\det(A)]^{-1}\)` - Weinstein-Aronszajn identity: `$$\det(I_m+A_{m\times n}B_{n\times m})=\det(I_n+BA)$$` --- # Woodbury Identity `$$(A+UCV)^{-1}=A^{-1}-A^{-1}U(C^{-1}+VA^{-1}U)^{-1}VA^{-1}$$` Special cases: - `\((I+UV)^{-1}=I-U(I+VU)^{-1}V\)` - `\((I+UU')^{-1}=I-U(I+U'U)^{-1}U'\)` - `$$(A+uv')^{-1}=A^{-1}-\frac{A^{-1}uv'A^{-1}}{1+v'A^{-1}u}$$` --- # Block Matrix Inversion If `\(D - {CA}^{-1}B\)` is invertible: `$$\scriptsize \begin{bmatrix} A & B \\ C & D \end{bmatrix}^{-1} = \begin{bmatrix} A^{-1} + A^{-1}B\left(D - {CA}^{-1}B\right)^{-1}{CA}^{-1} & -A^{-1}B\left(D - {CA}^{-1}B\right)^{-1} \\ -\left(D-{CA}^{-1}B\right)^{-1}{CA}^{-1} & \left(D - {CA}^{-1}B\right)^{-1} \end{bmatrix}$$` If `\(A - {BD}^{-1}C\)` is invertible: `$$\scriptsize \begin{bmatrix} A & B \\ C & D \end{bmatrix}^{-1} = \begin{bmatrix} \left(A - {BD}^{-1}C\right)^{-1} & -\left(A-{BD}^{-1}C\right)^{-1}{BD}^{-1} \\ -D^{-1}C\left(A - {BD}^{-1}C\right)^{-1} & \quad D^{-1} + D^{-1}C\left(A - {BD}^{-1}C\right)^{-1}{BD}^{-1} \end{bmatrix}$$` --- # Block Matrix Determinant If `\(A\)` is invertible: `$$\det\begin{pmatrix}A& B\\ C& D\end{pmatrix} = \det(A) \det\left(D - C A^{-1} B\right)$$` For any `\(A,B\in \mathbb{R}^{n\times n}\)`: `$$\det\begin{pmatrix}A& B\\ B& A\end{pmatrix} = \det(A+B) \det\left(A-B\right)$$` --- class: inverse, center, middle # Linear Systems --- class: center, middle # Triangular Systems --- # Triangular Matrices `$$L=\begin{bmatrix}\times\\ \times & \times\\ \vdots & \vdots & \ddots\\ \times & \times & \cdots & \times \end{bmatrix},\quad U=\begin{bmatrix}\times & \cdots & \times & \times\\ & \ddots & \vdots & \vdots\\ & & \times & \times\\ & & & \times \end{bmatrix}$$` - Triangular matrices are important building blocks of numerical linear algebra - Cheap multiplication, determinant, and linear system solving - Many matrix decompositions are in the form of triangular matrices --- # Basic Properties <sup><span class="small">[1]</span></sup> - A triangular matrix is invertible if and only if all its diagonal entries are non-zero - Invertible lower (upper) triangular matrices are closed under multiplication and inversion - The determinant of a triangular matrix is the product of its diagonal entries `$$\small \det\begin{bmatrix}\lambda_{1}\\ \times & \lambda_{2}\\ \vdots & \vdots & \ddots\\ \times & \times & \cdots & \lambda_{m} \end{bmatrix}=\lambda_{1}\det\begin{bmatrix}\lambda_{2}\\ \vdots & \ddots\\ \times & \cdots & \lambda_{m} \end{bmatrix}=\cdots=\lambda_{1}\cdots\lambda_{m}$$` --- # Basic Properties - .highlight[Question: What is the computational complexity of multiplying a triangular matrix with a vector?] -- - `\(O(n^2)\)` --- # Triangular Systems - We are interested in solving the linear systems of equations `\(Lx=b\)` `$$L=\begin{bmatrix}\begin{array}{cccc} l_{11}\\ l_{21} & l_{22}\\ \vdots & \vdots & \ddots\\ l_{n1} & l_{n2} & \cdots & l_{nn} \end{array}\end{bmatrix}$$` - The algorithm is called .highlight[forward substitution] --- # Forward Substitution - Let `\(l_{k,1:k}=(l_{k1},\ldots,l_{kk})'\)`, `\(x_{1:k}=(x_1,\ldots,x_k)'\)`, `\(k=1,\ldots,n\)` - The `\(k\)`-th equation gives `$$l_{k,1:k}'x_{1:k}=\sum_{i=1}^{k-1}l_{ki}x_i+l_{kk}x_k=b_k$$` - We can iteratively compute `\(x_1,\ldots,x_n\)` --- # Algorithm - Start with `\(x_1=b_1/l_{11}\)` - For `\(k=2,\ldots,n\)`, iterate `$$x_k=\left(b_k-\sum_{i=1}^{k-1}l_{ki}x_i \right)/l_{kk}$$` -- - .highlight[Computational complexity is] `\(O(n^2)\)` --- # Backward Substitution - Similarly, we can solve the linear systems of equations `\(Ux=b\)` with an upper triangular matrix `$$U=\begin{bmatrix}u_{11} & u_{12} & \cdots & u_{1n}\\ & u_{22} & \cdots & u_{2n}\\ & & \ddots & \vdots\\ & & & u_{nn} \end{bmatrix}$$` - The algorithm is called .highlight[backward substitution] -- - Please derive this algorithm by yourself --- # Implementation - Simulate matrices ```r set.seed(123) n = 2000 b = rnorm(n) M = 0.1 * matrix(rnorm(n^2), n) diag(M) = abs(diag(M)) + 1 # Get lower and upper triangular parts L = M * lower.tri(M, diag = TRUE) U = M * upper.tri(M, diag = TRUE) ``` --- # Implementation - In R, we have the `forwardsolve()` and `backsolve()` functions to implement the two algorithms ```r x1 = forwardsolve(L, b) max(abs(L %*% x1 - b)) # Verify L*x1 = b ``` ``` ## [1] 4.193368e-12 ``` ```r x2 = backsolve(U, b) max(abs(U %*% x2 - b)) # Verify U*x2 = b ``` ``` ## [1] 5.541345e-12 ``` --- # Implementation - In fact, we do not need to create a new matrix - The upper/lower triangular part would not be used in `forwardsolve()`/`backsolve()` - Reduces memory use ```r x1 = forwardsolve(M, b) max(abs(L %*% x1 - b)) # Verify L*x1 = b ``` ``` ## [1] 4.193368e-12 ``` ```r x2 = backsolve(M, b) max(abs(U %*% x2 - b)) # Verify U*x2 = b ``` ``` ## [1] 5.541345e-12 ``` --- # Benchmark - Whenever possible, use `forwardsolve()`/`backsolve()` instead of `solve()` ```r library(dplyr) bench::mark( solve(L, b), forwardsolve(L, b), backsolve(U, b), max_iterations = 10, check = FALSE ) %>% select(expression, min, median) ``` ``` ## # A tibble: 3 × 3 ## expression min median ## <bch:expr> <bch:tm> <bch:tm> ## 1 solve(L, b) 1.42s 1.42s ## 2 forwardsolve(L, b) 1.33ms 1.42ms ## 3 backsolve(U, b) 1.31ms 1.43ms ``` --- # Excercise - Implement the backward substitution algorithm - Experiment on simulated matrices - Use `backsolve()` to verify the result --- class: center, middle # Tridiagonal Systems --- # Tridiagonal Matrices - Tridiagonal matrices are band matrices that have nonzero elements only on the diagonal and two subdiagonals `$$T=\begin{bmatrix}b_{1} & c_{1}\\ a_{2} & b_{2} & c_{2}\\ & a_{3} & b_{3} & \ddots\\ & & \ddots & \ddots & c_{n-1}\\ & & & a_{n} & b_{n} \end{bmatrix}$$` - Useful in eigenvalue computation and spline interpolation --- # Basic Properties - Can be represented by three vectors - Storage requirement is linear in `\(n\)`, i.e., `\(O(n)\)` - Cheap multiplication, determinant, and linear system solving - .highlight[Question: What is the computational complexity of multiplying a tridiagonal matrix with a vector?] -- - `\(O(n)\)` --- # Tridiagonal Systems - We are interested in solving the linear systems of equations `\(Tx=d\)` `$$\begin{bmatrix}b_{1} & c_{1}\\ a_{2} & b_{2} & c_{2}\\ & a_{3} & b_{3} & \ddots\\ & & \ddots & \ddots & c_{n-1}\\ & & & a_{n} & b_{n} \end{bmatrix}\begin{bmatrix}x_{1}\\ x_{2}\\ x_{3}\\ \vdots\\ x_{n} \end{bmatrix}=\begin{bmatrix}d_{1}\\ d_{2}\\ d_{3}\\ \vdots\\ d_{n} \end{bmatrix}$$` --- # Algorithm - Forward sweep `$$\small c_{i}'=\begin{cases} \frac{c_{i}}{b_{i}}, & i=1\\ \frac{c_{i}}{b_{i}-a_{i}c_{i-1}'}, & i=2,\ldots,n-1 \end{cases},\qquad d_{i}'=\begin{cases} \frac{d_{i}}{b_{i}}, & i=1\\ \frac{d_{i}-a_{i}d_{i-1}'}{b_{i}-a_{i}c_{i-1}'}, & i=2,\ldots,n \end{cases}$$` - Backward substitution `$$\begin{align*} x_{n} & =d_{n}',\\ x_{i} & =d_{i}'-c_{i}'x_{i+1},\quad i=n-1,\ldots,1 \end{align*}$$` - .highlight[Computational complexity is] `\(O(n)\)` --- # Implementation - Simulate matrices ```r set.seed(123) n = 2000 diagonal = rnorm(n) lsubdiag = rnorm(n - 1) usubdiag = rnorm(n - 1) b = rnorm(n) # Explicitly form the matrix M = diag(diagonal) diag(M[2:n, ]) = lsubdiag diag(M[, 2:n]) = usubdiag M[1:5, 1:5] ``` ``` ## [,1] [,2] [,3] [,4] [,5] ## [1,] -0.5604756 1.1210219 0.0000000 0.00000000 0.0000000 ## [2,] -0.5116037 -0.2301775 0.1965498 0.00000000 0.0000000 ## [3,] 0.0000000 0.2369379 1.5587083 0.65011319 0.0000000 ## [4,] 0.0000000 0.0000000 -0.5415892 0.07050839 0.6710042 ## [5,] 0.0000000 0.0000000 0.0000000 1.21922765 0.1292877 ``` --- # Implementation - The `tridiagmatrix()` function in the **cmna** R package implements the described algorithm ```r library(cmna) x = tridiagmatrix(lsubdiag, diagonal, usubdiag, b) max(abs(M %*% x - b)) # Verify M*x = b ``` ``` ## [1] 2.298162e-13 ``` --- # Benchmark - The specialized algorithm is much faster than the general `solve()` ```r bench::mark( solve(M, b), tridiagmatrix(lsubdiag, diagonal, usubdiag, b), max_iterations = 10, check = FALSE ) %>% select(expression, min, median) ``` ``` ## # A tibble: 2 × 3 ## expression min median ## <bch:expr> <bch:tm> <bch:tm> ## 1 solve(M, b) 1.37s 1.37s ## 2 tridiagmatrix(lsubdiag, diagonal, usubdiag, b) 614.1µs 650.25µs ``` --- # Benchmark - .highlight[Warning: the described algorithm may be unstable in some cases. If stability is required, use LU decomposition instead] --- class: center, middle # LU Decomposition --- # LU Decomposition - LU decomposition is an important method to solve general linear systems - Factorizes an `\(n\times n\)` matrix `\(A\)` into the product of two .highlight[triangular] matrices, `\(A=LU\)` - `\(L\)` lower triangular, with ones on the diagonal - `\(U\)` upper triangular --- # Factorization Theorem <sup><span class="small">[2]</span></sup> Let `\(A\)` be an `\(n\times n\)` matrix such that all of its diagonal submatrices are nonsingular. Then there exist a lower triangular matrix `\(L\)` with unit diagonal elements (i.e., `\(l_{ii}=1\)`), and an upper triangular matrix `\(U\)`, such that `\(A=LU\)`. --- # Solving Linear Systems - Suppose the decomposition `\(A=LU\)` is given - If we wish to solve `\(Ax=b\)`, then: - First, solve `\(Ly=b\)` to get `\(y\)` .highlight[(forward substitution)] - Second, solve `\(Ux=y\)` to get `\(x\)` .highlight[(backward substitution)] --- # Computing Determinant - Suppose the decomposition `\(A=LU\)` is given - .highlight[Question: How to compute] `\(\require{color}\color{deeppink}\det(A)\)`.highlight[?] -- - `\(\det(A)=\det(L)\det(U)=\det(U)=u_{11}\cdots u_{nn}\)` --- # Algorithm <sup><span class="small">[3]</span></sup> Based on the relation 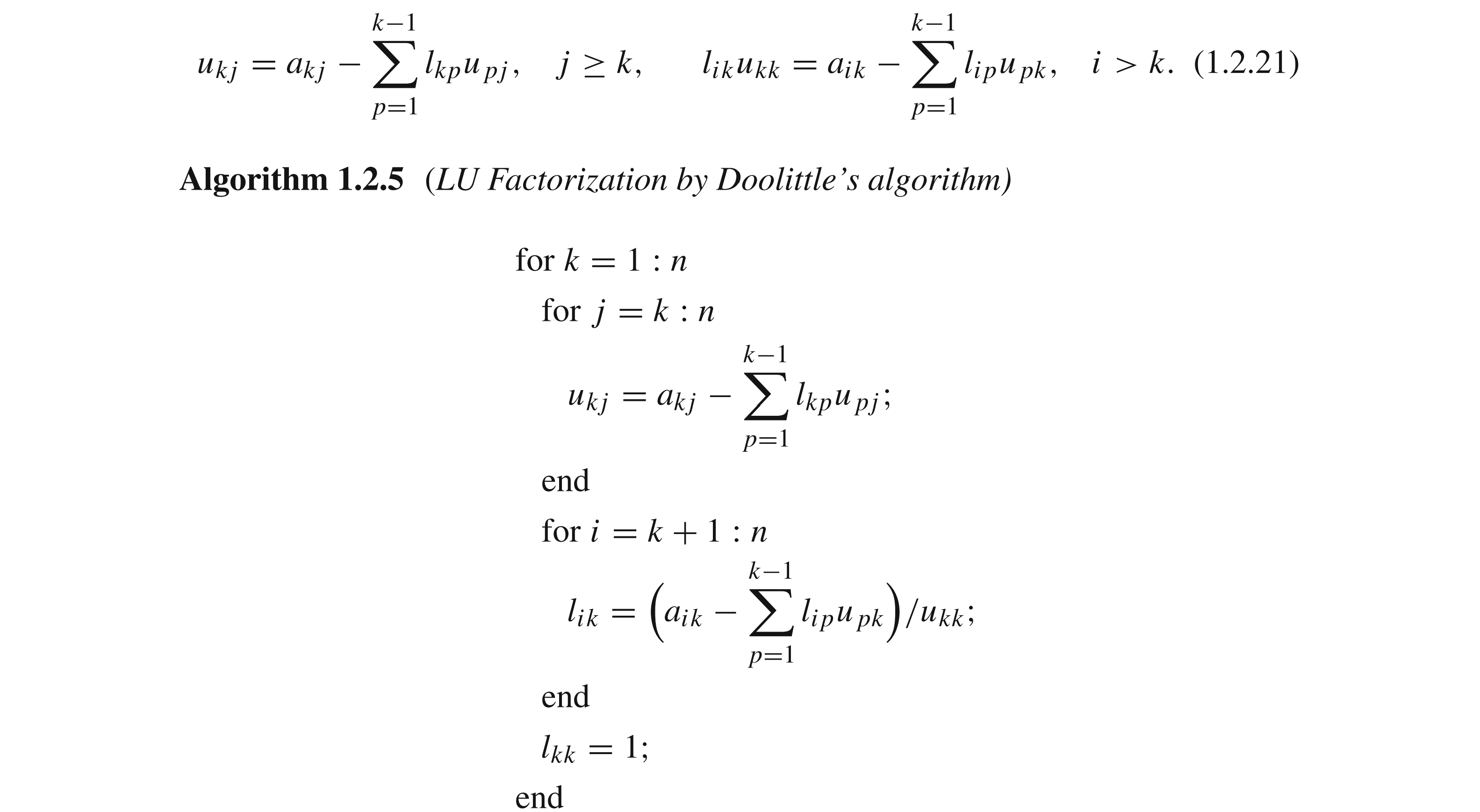 --- # Pivoting - In practice, LU decomposition is performed with a permutation matrix `\(Q\)`, which is typically called .highlight[pivoting]: `$$QA=LU$$` - This is used to enhance the numerical stability - `\(Q\)` has the effect of interchanging rows of `\(A\)` - `\(Q\)` satisfies `\(Q'Q=QQ'=I\)` --- # Pivoting - When using this factorization to solve linear systems `\(Ax=b\)` - First, compute `\(\tilde{b}=Qb\)` - Second, solve `\(Ly=\tilde{b}\)` to get `\(y\)` - Third, solve `\(Ux=y\)` to get `\(x\)` --- # Computational Complexity - .highlight[Decomposition part is] `\(O(n^3)\)` - .highlight[Linear system solving part is] `\(O(n^2)\)` --- # Implementation - The `lu()` function in the **Matrix** package can be used to compute the LU decomposition of a square matrix - Note that this function factorizes `\(A\)` as `\(A=PLU\)`, or equivalently, `\(P'A=LU\)` (i.e., `\(Q=P'\)`) ```r library(Matrix) ``` ``` ## Warning: package 'Matrix' was built under R version 4.2.3 ``` ```r set.seed(123) n = 5 M = matrix(rnorm(n^2), n) lu_obj = lu(M) decomp = expand(lu_obj) names(decomp) # A named list ``` ``` ## [1] "L" "U" "P" ``` --- # Implementation ```r decomp$L ``` ``` ## 5 x 5 Matrix of class "dtrMatrix" (unitriangular) ## [,1] [,2] [,3] [,4] [,5] ## [1,] 1.00000000 . . . . ## [2,] -0.35957699 1.00000000 . . . ## [3,] 0.04523514 -0.49963385 1.00000000 . . ## [4,] 0.08294543 -0.27038315 -0.28235315 1.00000000 . ## [5,] -0.14767195 0.21751065 0.15641432 -0.65806034 1.00000000 ``` ```r decomp$U ``` ``` ## 5 x 5 Matrix of class "dtrMatrix" ## [,1] [,2] [,3] [,4] [,5] ## [1,] 1.5587083 -1.2650612 0.4007715 -1.9666172 -1.0260044 ## [2,] . 1.2601781 1.3681900 1.0797629 -1.4367513 ## [3,] . . 0.7761478 1.3298022 -1.4003294 ## [4,] . . . 0.3577540 -1.3237976 ## [5,] . . . . -0.7090854 ``` --- # Implementation ```r decomp$P ``` ``` ## 5 x 5 sparse Matrix of class "pMatrix" ## ## [1,] . | . . . ## [2,] . . . . | ## [3,] | . . . . ## [4,] . . | . . ## [5,] . . . | . ``` ```r # Verify P*L*U = A max(abs(decomp$P %*% decomp$L %*% decomp$U - M)) ``` ``` ## [1] 2.220446e-16 ``` --- # Implementation - We can then write a simple function to solve linear systems given the decomposition result ```r lu_solve = function(decomp, b) { bt = t(decomp$P) %*% b y = forwardsolve(as.matrix(decomp$L), bt) # L*y = b x = backsolve(as.matrix(decomp$U), y) # U*x = y x } ``` --- # Implementation - Verify the result ```r set.seed(123) n = 2000 M = matrix(rnorm(n^2), n) b = rnorm(n) decomp = expand(lu(M)) x = lu_solve(decomp, b) max(abs(M %*% x - b)) # Verify M*x = b ``` ``` ## [1] 1.933176e-11 ``` --- # Benchmark - The LU decomposition itself dominates the time of solving linear systems ```r bench::mark( solve(M, b), expand(lu(M)), lu_solve(decomp, b), max_iterations = 10, check = FALSE ) %>% select(expression, min, median) ``` ``` ## # A tibble: 3 × 3 ## expression min median ## <bch:expr> <bch:tm> <bch:tm> ## 1 solve(M, b) 1.4s 1.4s ## 2 expand(lu(M)) 1.37s 1.37s ## 3 lu_solve(decomp, b) 17.63ms 18.85ms ``` --- # When to Use? - If `\(Ax=b\)` only needs to be solved once: - Directly calling `solve()` is more convenient - `solve()` internally uses algorithms similar to LU decomposition - If a sequence of linear systems `\(Ax^{(k)}=b^{(k)}\)` need to be solved iteratively - First factorize `\(A\)` using LU decomposition - Then use `lu_solve()` to get each solution `\(x^{(k)}\)` - We will encounter the second case in many optimization problems --- class: center, middle # Cholesky Decomposition --- # Cholesky Decomposition - LU decomposition applies to general square matrices - If we can guarantee the matrix `\(A\)` to be .highlight[positive definite] - Example: `\(A=X'X+\lambda I\)`, `\(\lambda>0\)` - Then the Cholesky decomposition `\(A=LL'\)` can be computed - `\(L\)` is a lower triangular matrix --- # Factorization Theorem <sup><span class="small">[2]</span></sup> Let `\(A\)` be an `\(n\times n\)` real symmetric positive definite matrix. Then there exists a unique lower triangular matrix `\(L\)` with positive diagonal elements, such that `\(A=LL'\)`. --- # Algorithm <sup><span class="small">[3]</span></sup> Based on the relation `$$l_{jj}=\sqrt{a_{jj}-\sum_{k=1}^{j-1}l_{jk}^2}$$` `$$l_{ij}=\left(a_{ij}-\sum_{k=1}^{j-1}l_{ik}l_{jk}\right)/l_{jj},\quad i=j+1,\ldots,n$$` --- # Solving Linear Systems - Suppose the decomposition `\(A=LL'\)` is given - If we wish to solve `\(Ax=b\)`, then: - First, solve `\(Ly=b\)` to get `\(y\)` .highlight[(forward substitution)] - Second, solve `\(L'x=y\)` to get `\(x\)` .highlight[(backward substitution)] --- # Computing Determinant - Suppose the decomposition `\(A=LL'\)` is given - .highlight[Question: How to compute] `\(\require{color}\color{deeppink}\det(A)\)`.highlight[?] -- - `\(\det(A)=[\det(L)]^2=l_{11}^2\cdots l_{nn}^2\)` --- # Computational Complexity - .highlight[Decomposition part is] `\(O(n^3)\)` - .highlight[Linear system solving part is] `\(O(n^2)\)` - Same orders as LU decomposition, but in general faster --- # Implementation - In R, the `chol()` function can be used to compute Cholesky decomposition - Note that this function factorizes `\(A\)` as `\(A=R'R\)`, so you actually get `\(R=L'\)` ```r set.seed(123) n = 5 M = matrix(rnorm(n^2), n) A = crossprod(M) # positive definite R = chol(A) R ``` ``` ## [,1] [,2] [,3] [,4] [,5] ## [1,] 1.678801 -1.873512 -0.1240544 -2.4977185 -0.6449736 ## [2,] 0.000000 1.383693 1.2267898 0.6009298 -0.7682812 ## [3,] 0.000000 0.000000 0.7676374 1.1355032 -0.8695156 ## [4,] 0.000000 0.000000 0.0000000 0.3672150 -1.0253122 ## [5,] 0.000000 0.000000 0.0000000 0.0000000 0.5906208 ``` --- # Implementation - Then we can write a simple function to solve linear systems given the decomposition result ```r chol_solve = function(R, b) { y = backsolve(R, b, transpose = TRUE) # R'*y = b x = backsolve(R, y) # R*x = y x } ``` --- # Implementation - Verify the result ```r set.seed(123) n = 2000 M = matrix(rnorm(n^2), n) A = crossprod(M) b = rnorm(n) R = chol(A) max(abs(crossprod(R) - A)) # Verify R'R = A ``` ``` ## [1] 1.364242e-12 ``` ```r x = chol_solve(R, b) max(abs(A %*% x - b)) # Verify A*x = b ``` ``` ## [1] 4.437666e-09 ``` --- # Benchmark - The decomposition part dominates the time of solving linear systems ```r bench::mark( solve(A, b), chol(A), chol_solve(R, b), max_iterations = 10, check = FALSE ) %>% select(expression, min, median) ``` ``` ## # A tibble: 3 × 3 ## expression min median ## <bch:expr> <bch:tm> <bch:tm> ## 1 solve(A, b) 1.38s 1.38s ## 2 chol(A) 1.31s 1.31s ## 3 chol_solve(R, b) 3.62ms 5.04ms ``` --- # When to Use? - As long as you can guarantee `\(A\)` is positive definite, prefer to use Cholesky decomposition - `solve()` does not know the special property of `\(A\)`, so it will use the slightly slower LU decomposition - Cholesky decomposition utilizes this "prior information" - Cholesky decomposition can also be used when a sequence of linear systems `\(Ax^{(k)}=b^{(k)}\)` need to be solved iteratively --- # References [1] Folkmar Bornemann (2018). Numerical Linear Algebra. Springer. [2] Grégoire Allaire and Sidi Mahmoud Kaber (2008). Numerical linear algebra. Springer. [3] Åke Björck (2015). Numerical methods in matrix computations. Springer.